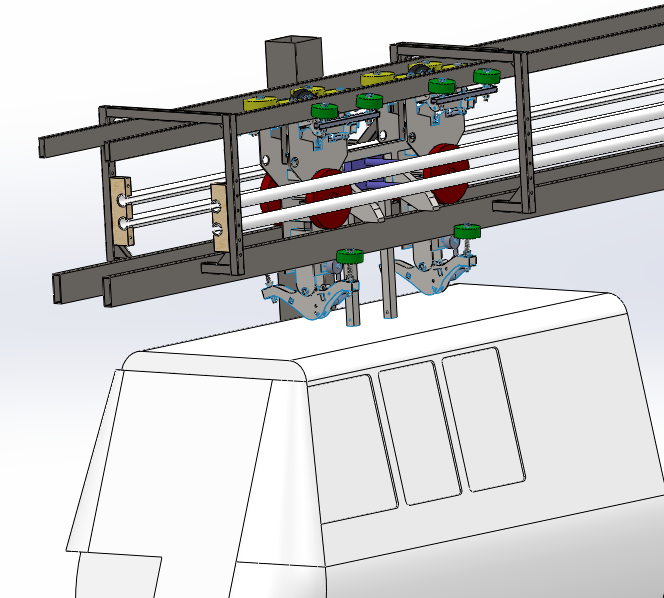
Intermediate Scale
Guideway
Project Scope and Objectives
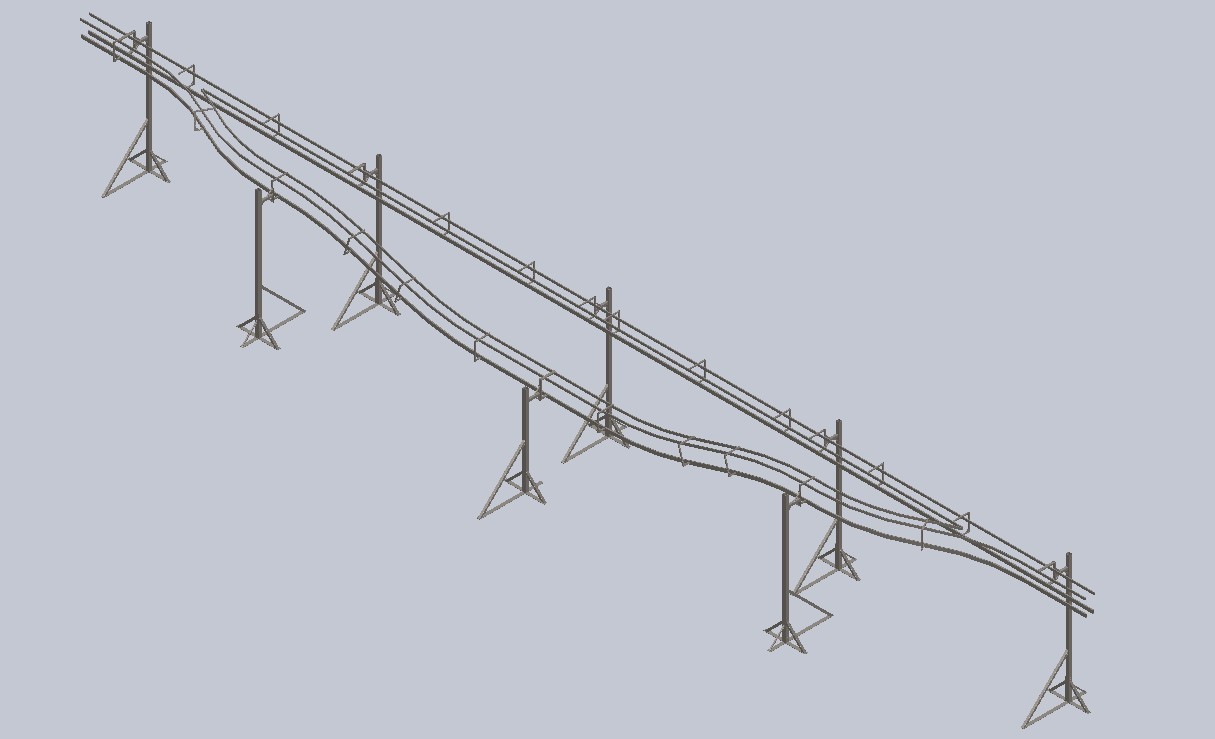
 Design a Guideway
Design a Guideway
- Must demonstrate a 17 degree incline and decline.
- Must support the bogie, the structure that supports the entire mechanism and holds up the cabin.
- Must be easy to disassemble and assemble.
- Must support solar panels and wayside pickup.
Project Results
- Successfully provided rails that travel downward in 17 degrees.
- Successfully designed guideway can hold the require load of the bogie, cabin and power supplies.
- Demonstrated sections of rail can easily be disassembled, transported, and assembled.
- Guideway can support power supplies.
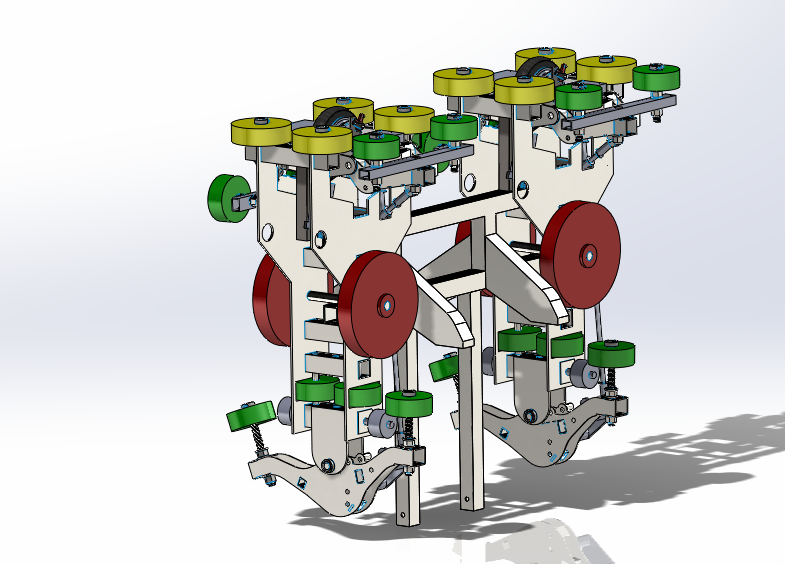
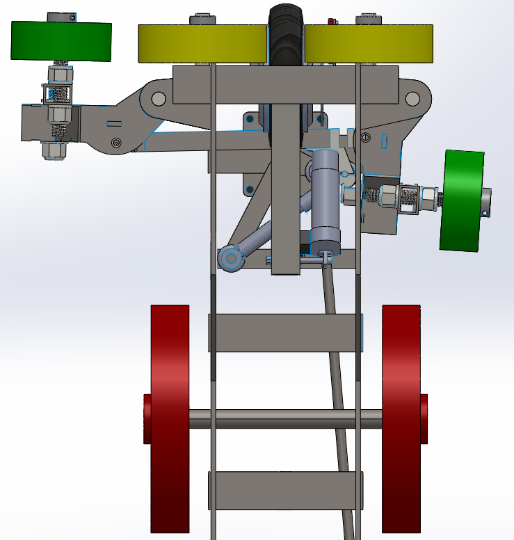
Bogie/ Fail-safe Mechanisms
 Team Members
Team Members
- Cassandra Acosta (Lead)
- Aaron Cheng
- Christopher McCormick
- Steven Luong
- Uday Ranjeet
- Vicente Viqueira
Project Scope and Objectives
- Re-design bogie to be able to traverse up and down a guideway sloped at ±17° (30% grade) at 1-2 mph.
- Re-design bogie and h-bar to integrate all supporting teams (propulsion, steering, braking, guideway, suspension, wayside power, and cabin).
- Design fail-safe mechanisms to prevent the bogie from falling off the guideway in case the switching mechanism or main support wheels fail.
Project Results
- Successfully designed and constructed a fail-safe mechanism with a safety factor of 4.
- Successfully designed and constructed fail-safe mechanisms that can support 300lbs (weight of the bogie and all connected components).
- Successfully constructed a bogie that incorporates all the supporting teams’ designs.
- Demonstrated the bogie traversing the guideway slope.
Active Suspension
 Student Team Members
Student Team Members
- Scott Garfield (Team Leader)
- Tyler Broder
- Matt Menezes
- Dale Franklin
- Enkhjin Baasandorj
Project Scope and Objectives
Create a suspension system for the Spartan Superway that will isolate the cabin from vibration and keep the cabin in a comfortable orientation while traveling down the railway.
- The suspension system must keep the cabin level as it traverses through up to 17 degrees of tilt.
- The suspension system must reduce the transmitted vibrations from possible variations in the railway.
- The suspension system must be able to support the estimated mass of the intermediate scale cabin.
- As the pod arrives at a station, the suspension system must level the floor of the cabin with the floor of the platform to provide utmost accessibility.
Project Results
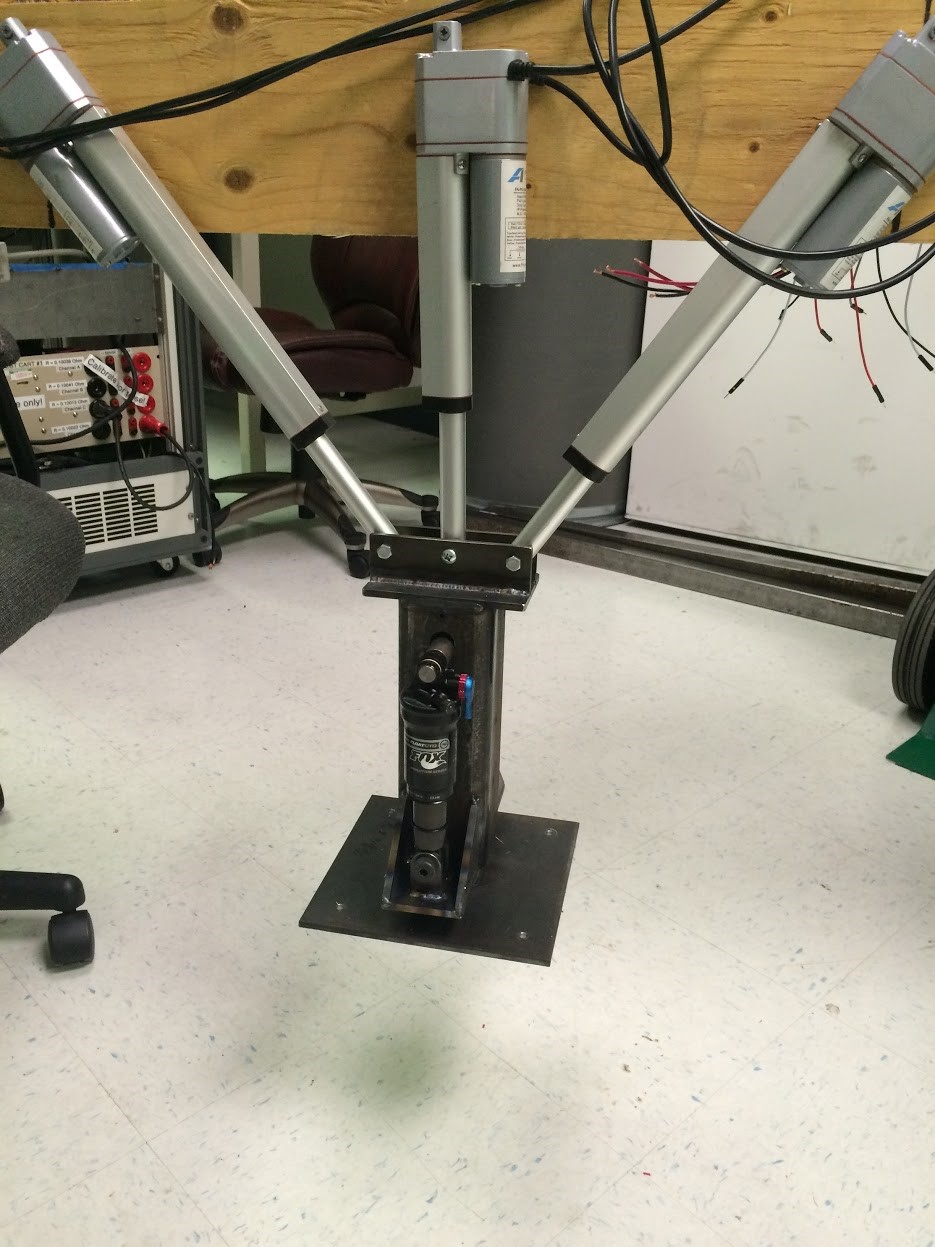
- Successfully designed, modeled, simulated, and fabricated a tension-to-compression suspension system.
- Prototyped controls code implementing an IMU and a PID control algorithm.
Propulsion
Student Team Members
- Christopher McCormick (Lead)
- Cassandra Acosta
- Aaron Cheng
- Steven Luong
- Uday Ranjeet
- Vicente Viqueira
Project Scope and Objectives
Design propulsion to allow intermediate-scale bogie to traverse the sloped, suspended guideway.
- Choose and obtain a hub motor that will propel the 350lb (approx.) bogie and cabin up a slope of 17º.
- Design a mount to secure the motor to the bogie.
- Design a spring mechanism to press the hub motor into the ceiling of the track with enough force to produce sufficient friction to move the bogie up the slope.
- Interface the motor with a microcontroller to control it.
Project Results
- Found power requirements to be approximately 0.5HP and required propulsion force to be 470N (47.8 N-m at 4in radius) to move the vehicle up the slope at 2mph.
- Successfully obtained a motor and controller that fulfilled our power and torque requirements.
- Modified the H-bar of the original bogie design to accommodate the size of the motor wheel and mount.
- Programmed the Arduino microcontroller to operate propulsion, steering, and braking.

Steering Mechanism / Braking System
Student Team Members
- Thang Ngo
- Chin Ming Lui
- Jeffrey Chau
Project Scope and Objectives
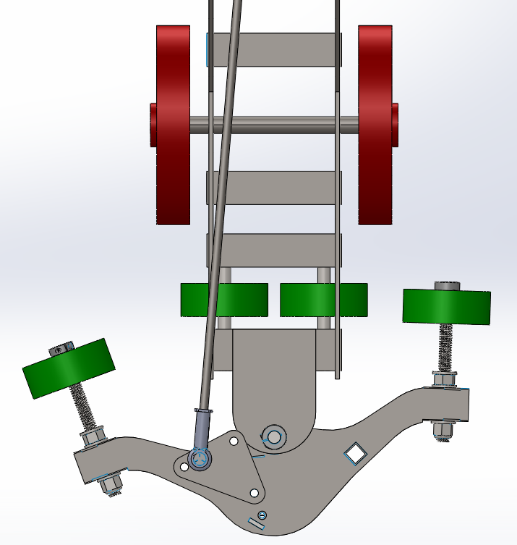
Design an automatic steering mechanism and braking system for Spartan Superway
 Design a braking system using mechanical disc brake that is programmed to an Arduino
Design a braking system using mechanical disc brake that is programmed to an Arduino
- Design a steering mechanism that is powered by a stepper motor for fast and optimal performance
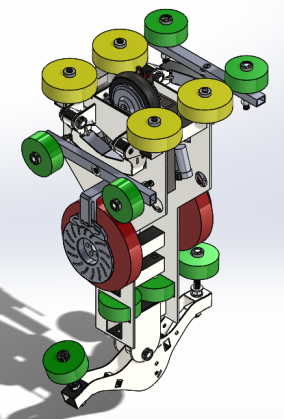
- Design structure of bogie that synchronizes motion of upper and lower control arms for optimal switching and better overall reliability and efficiency
- Build a ½ scale model of the proposed personal rapid transit system (PRT)
Project Results
- Successfully designed, constructed, and tested steering mechanism and brake system
- Successfully simulated the control of steering mechanism and brake on the guideway
 Demonstrated sophisticated design of the structure of the bogie
Demonstrated sophisticated design of the structure of the bogie
- Measured and optimized the steering mechanism and brake system
- Evaluated the power requirements for the steering mechanism and brake system
- Successfully and efficiently integrated the control arms and braking system into the structure of the bogie
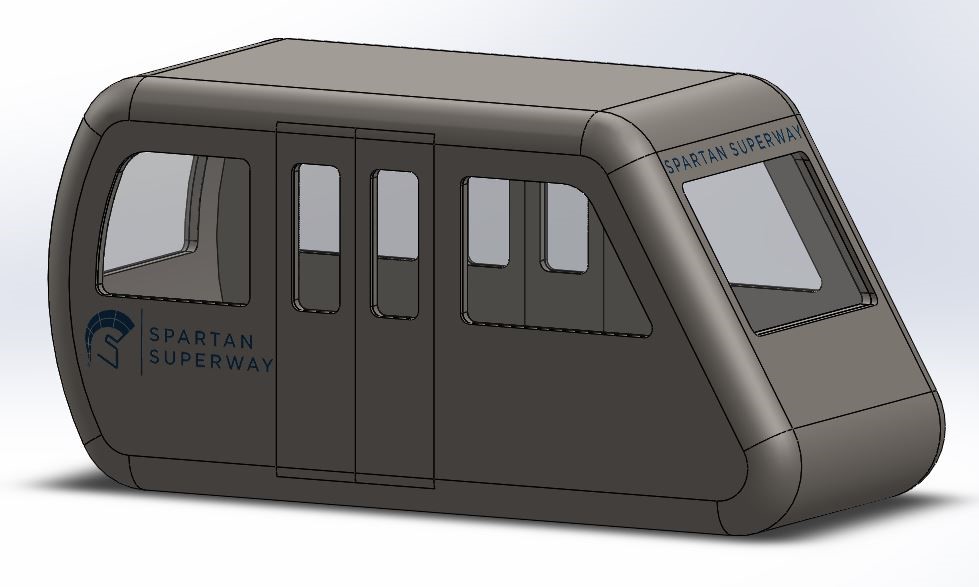
Cabin

Student Team Members
- Lucas Petersen (Team Leader)
- Mark Acoba
- Rebecca Alvarez
Project Scope and Objective
Design a prototype cabin for a sustainable public rapid transit system (PRT).
- Design an aesthetically pleasing interior and exterior views in one model.
- Design a model that will include new safety features and needs for the riders, including ADA standards and bike storage.
- Design an aerodynamic shape to minimize overall drag.
Project Results
- Completed a design for a full-scale cabin for PRT system.
- Successfully designed a cabin with drag coefficient at (1.3)
- Successfully completed a fully detailed fourth-scale model cabin.
- Successfully completed an intermediate scale model of the cabin to complement the intermediate model of track assembly.

Wayside Power
 Student Team Members
Student Team Members
- Garrett Gemmel
- Michael Hurst
- Dianna Man
- Karmjot Singh
Project Scope and Objectives
- Design a working power interface system for the Spartan Superway.
- Research methods to supply power using Solar Panels.
- Design a cost-effective power interface system to supply power to the power components of the pod cars.
- Integrate solar energy to the wayside grid to power using renewable and clean energy.
- Design for safety and aesthetics.
Project Results
- Successfully researched methods for power interfaces.
- Successfully designed a wayside system consisting of a 4th rail configuration.
- Integrated the system to power up the Spartan Superway using wayside pickup.
- Fabricated 80% of the components needed.
Intermediate Scale Solar
 Student Team Members
Student Team Members
- Augustine Soucy (Team Leader)
- David De Ocampo
- David Luo
- Jaymie Zapata
Project Scope and Objectives
Develop a mounting system for intermediate scale and create a performance analysis tool for planning of deployment.
Mounting System Requirements
- Modular- easy to assemble and take apart
- Design a frame that would eliminate the need a tracking system on the full-scale model.
- Able to fully power the intermediate solar scale track
- Structurally sturdy and aesthetically pleasing
Performance Tool Analysis Requirements
- Provide performance analysis of solar panels needed for deployment
Project Results
- Successfully developed, constructed, and tested a mounting system that fits the requirements.
- Successfully created performance analysis tool that provides necessary information for deployment of solar panels.
