Twelfth Scale
Twelfth Scale Team
Student Team Members
 Controls Team
Controls Team
- Henry Xie (Team Leader)
- Thomas Nguyen
- Kenneth Aganon
- Nasrat Haidari
Vehicle Team
- David Chen
- Bryan Ho
Track Team
- David Paul Y. Sales
- Kenny Strickland
- Ali Bootwala
Project Scope and Objectives
 Design and assemble a small scale Autonomous Transportation System that can be disassembled
and transported easily so it can be shown to people to gain exposure and show people
how it functions.
Design and assemble a small scale Autonomous Transportation System that can be disassembled
and transported easily so it can be shown to people to gain exposure and show people
how it functions.
Controls Team
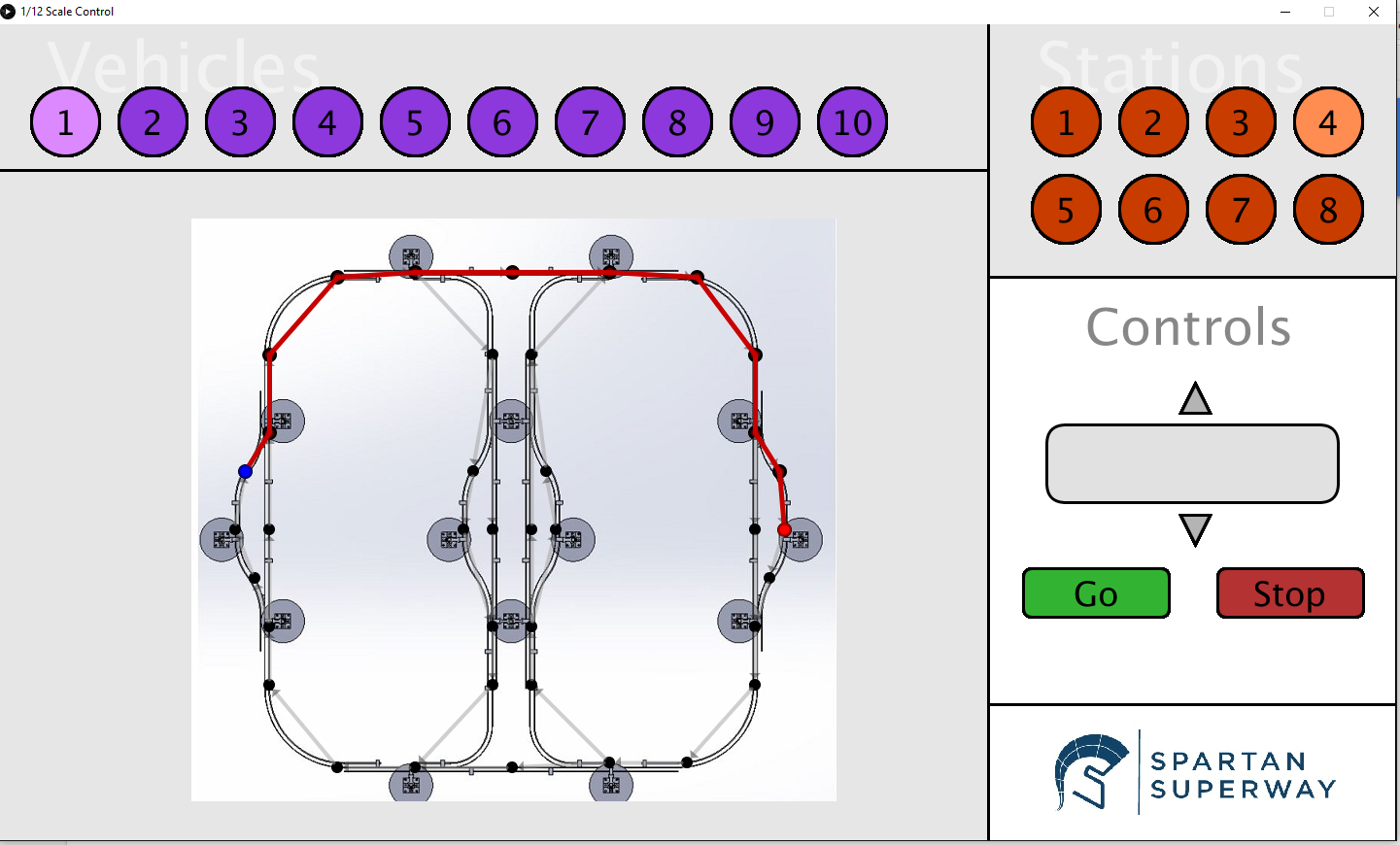
- Design a new control system that will provide location information for multiple vehicles using localized nodes (figure 1) and barcode sensors.
Vehicle Team
- Finalize bogie design and send out drawings for fabrication.
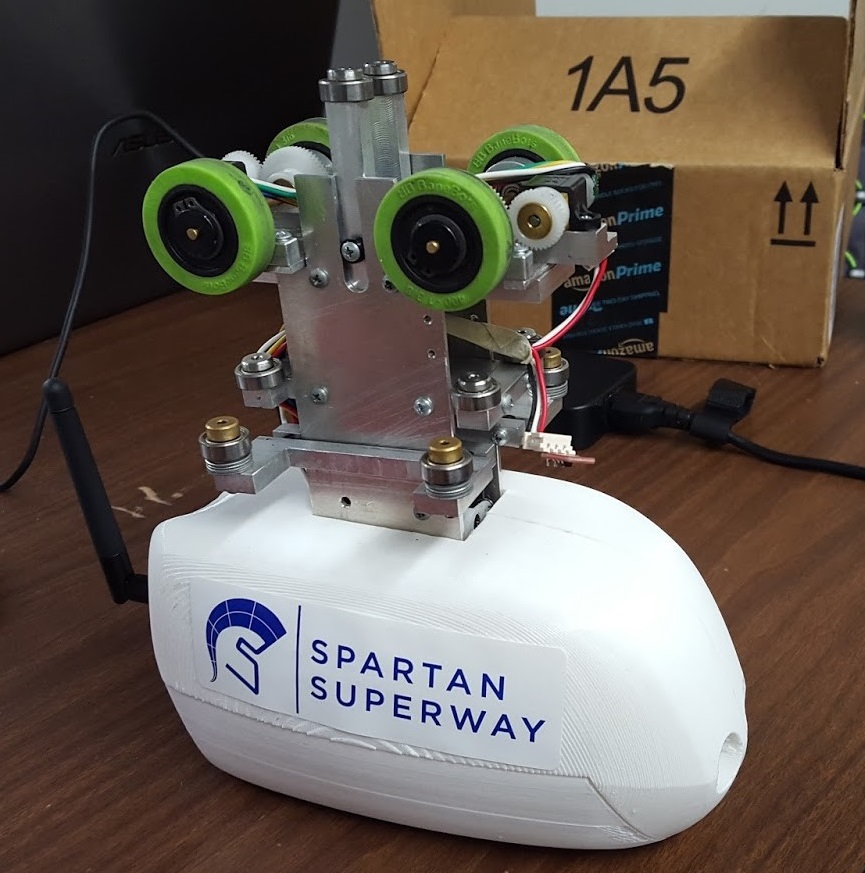
- Design and 3D print cabins (figure 2) to house the electronic components.
Track Team
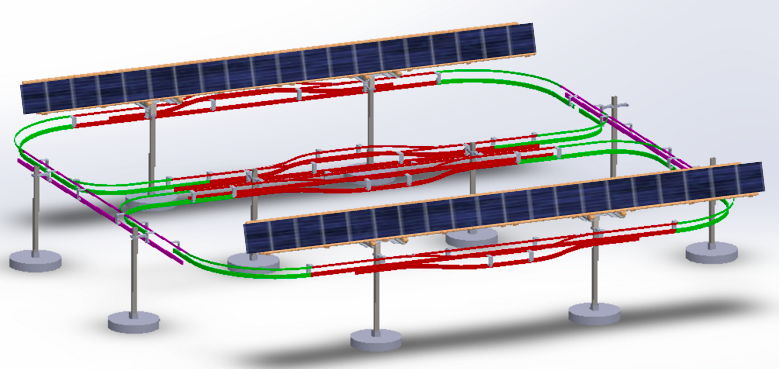
 Design a bigger track (figure 3) that can be easily assembled and transported and
can accommodate multiple vehicles at one time.
Design a bigger track (figure 3) that can be easily assembled and transported and
can accommodate multiple vehicles at one time.
Project Results
- Successfully designed and constructed a bigger two-loop track made out of aluminum that can accommodate up to ten vehicles as shown in figure 3.
- Successfully designed the new barcode scanner for the vehicles and position tracking for the vehicles.
- In the process of building up to ten vehicles and testing the controls program on the new track.
Twelfth Scale Solar Team
 Project Scope and Objectives
Project Scope and Objectives
Design multiple solar panel arrays to provide power for scaled model of Spartan Superway
- Design functional solar panel array assembly to properly represent the full scale Spartan Superway.
- Design curved solar panel frames to increase visualization and efficiency.
- Design solar panel array mounts that are able to be adjusted to various angles.
- Design solar panel array assembly that will provide power to bogies.
 Project Results
Project Results
- Successfully designed, fabricated, and tested curved solar panel frame.
- Successfully created solar panel array assembly using Solidworks.
- Successfully created on track and functional panels.
- Demonstrated an accurate visualization of the full scale Spartan Superway.
- Demonstrated solar panel array mount that has the ability to range from 0 to 90 degrees.
- Measured a current of 3.1 amps and a voltage of 21 volts for each solar panel array.
- Successfully created a DC load to power a bogie or battery charger.

Introducing the Controls Team
 "We put the A in ATN." The Controls team (a.k.a. the "A-Team") is responsible for
turning the transit network developed by the other subsystem teams into an automated
transit network. This involves integrating all the moving parts of the pod with sensors
and interfacing them with a computer that can communicate with a city-spanning network.
This network coordinates all the consumer requests and pod destinations to provide
an efficient, reliable, and safe means of on-demand transportation.
"We put the A in ATN." The Controls team (a.k.a. the "A-Team") is responsible for
turning the transit network developed by the other subsystem teams into an automated
transit network. This involves integrating all the moving parts of the pod with sensors
and interfacing them with a computer that can communicate with a city-spanning network.
This network coordinates all the consumer requests and pod destinations to provide
an efficient, reliable, and safe means of on-demand transportation.
The Controls team consists of Mechatronics and Computer Engineering students developing hardware and software that seamlessly work together to provide intelligence to the system as a whole. To prototype such a broad system, the team is working with a scale model of the automated transit network inherited from the founding group. The current focus of the team is to further develop the sensing capabilities and increase the level of autonomy of the pod. Additionally, the team is improving the network monitoring and scheduling capabilities, developing a graphical user interface (GUI) to control the pods, and introducing a real-time operating system (RTOS). The team's goal for this year is to produce a real-world simulation on the test track that can easily scale to accommodate larger and more complex transit layouts.