Robotics-Related Research
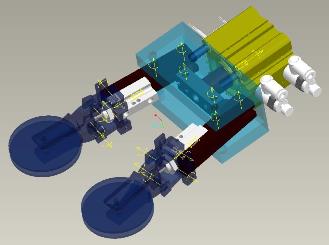
Multi-finger Pipe Climbing Robot
 Sponsor: NSF Research Grant
Sponsor: NSF Research Grant
UG Students: P. Howe, K. Mihaylov, J. Martin, P. Nguyen, and H. Nguyen
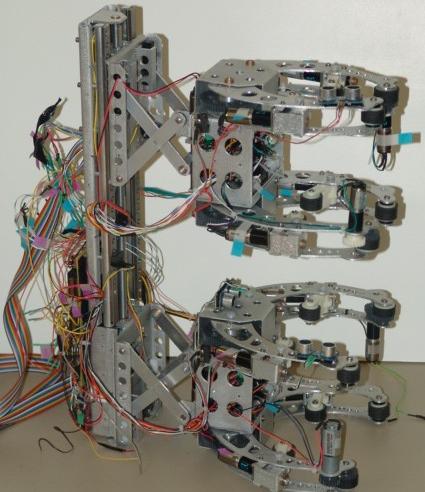
This robot is capable of climbing up and down pipes ranging from 2” to 6”in diameter to perform inspection tasks. This unique design allows robot overcome obstacles along the pipe such as fittings, flanges, and junctions. It contains 29 motors, 36 gears, 14 rollers, 4 microcontrollers, 4 ultrasonic sensors, 2 touch switches. All fingers are curved shape (hard to manufacture). This project won the best technical content award and 1st place in 2010 ASME regional student competition.
Rolling Pipe Climbing Robot
 Sponsor: NSF Research Grant
Sponsor: NSF Research Grant
UG Students: L. Go, K. Chang, C. David, and J. P. Mina
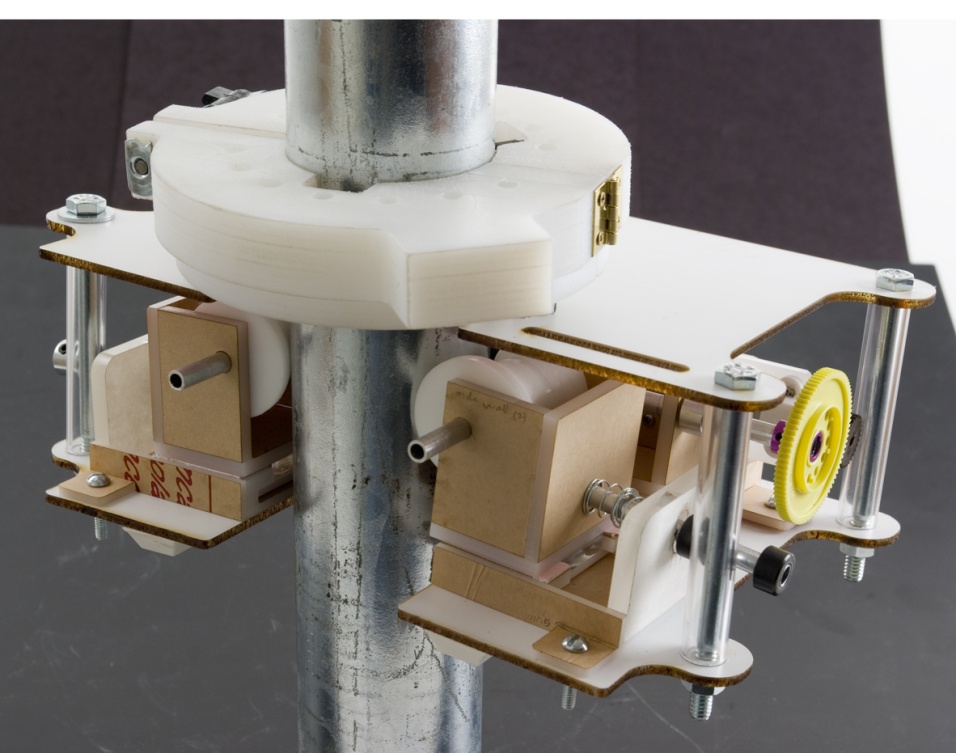
This robotic system can perform automatic pipe inspections for small and vertical pipes. No one, so far, has successfully built a robot that can climb such small pipes vertically. The system utilizes novel climbing and rotating mechanisms, so the robot can not only “grab” the pipe, but also climb the pipe and rotate around the pipe. This allows all areas on the pipe to be inspected. This project won the 2nd place in 2009 ASME regional student poster competition.
Power-line Climbing Robot for Ice Remover
Sponsor: Joby Energy (Santa Cruz, CA)
Graduate Student: J. K. Gibboney
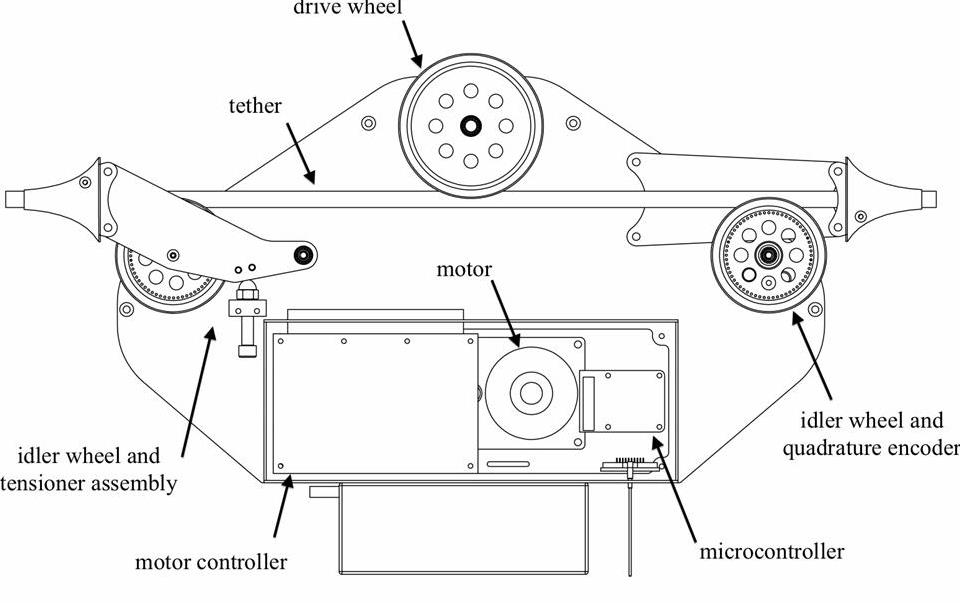
To generate power, airborne wind turbines must be tethered to the ground by a long cable. This cable is vulnerable to the formation of ice along its length from the cold, wet air found in wintertime clouds. This mobile robot is able to climb the line and remove the ice. A prototype was built and tested, and control methods were investigated (due to confidential reason the real picture is not shown here).
Peripherally Inserted Central Catheter Insertion System
Sponsor: VasoNova, Inc., (Sunnyvale, CA)
UG Students: J. Fung, N. Cuntapay, and D. Pham
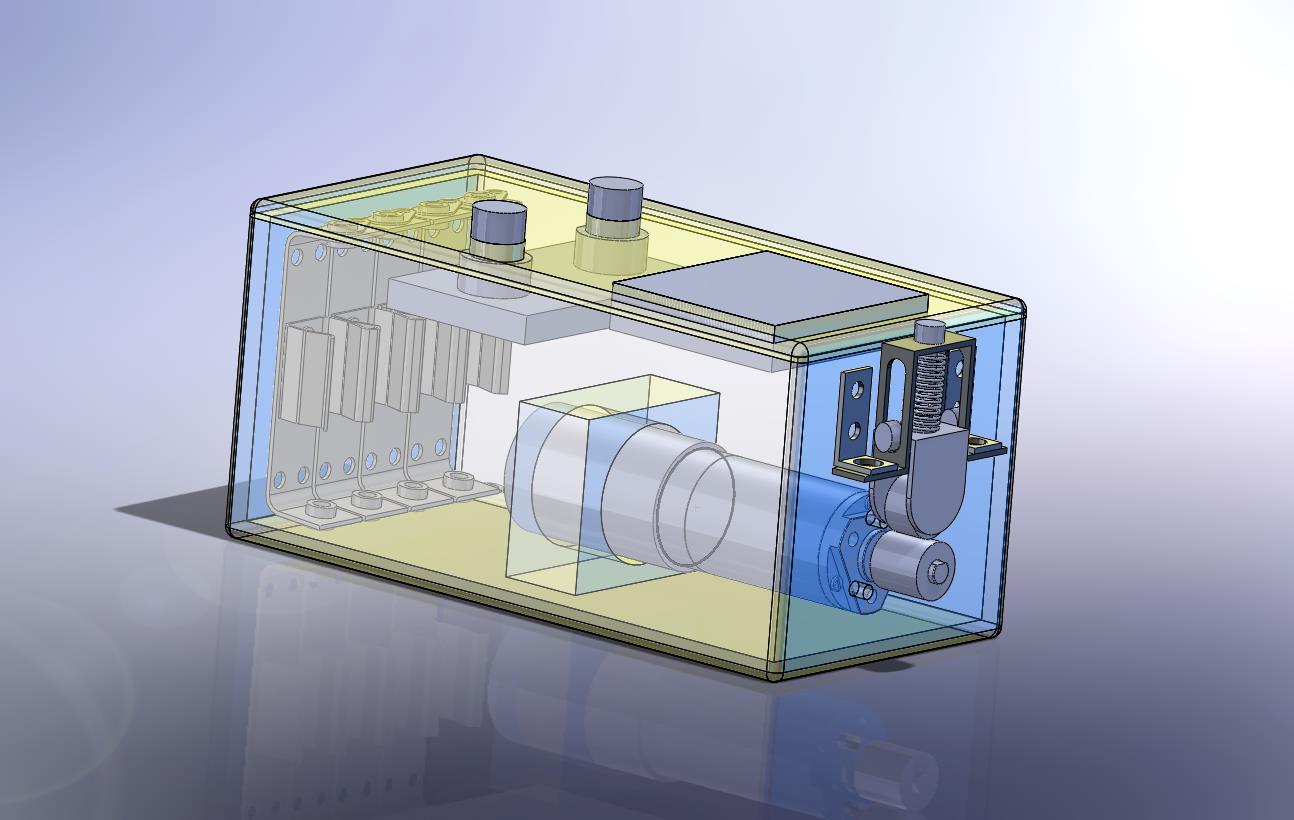 The device we developed can feed the catheter line in between two wheels held in compression
by friction and spring forces. One wheel is powered by a micro electric motor. The
motor encoder outputs the rotation information to an ATmega Microcontroller where
the data can be converted into linear distance to be displayed by an LCD screen.
After several tests, the accuracy of the system was slightly shifted and the errors
are identified due to the coding and power handling.
The device we developed can feed the catheter line in between two wheels held in compression
by friction and spring forces. One wheel is powered by a micro electric motor. The
motor encoder outputs the rotation information to an ATmega Microcontroller where
the data can be converted into linear distance to be displayed by an LCD screen.
After several tests, the accuracy of the system was slightly shifted and the errors
are identified due to the coding and power handling.
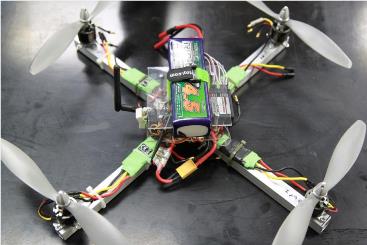
Aerial Robotic Sensor Network for Wildfire Detection and Tracing
 Sponsor: ASME Silicon Valley Section
Sponsor: ASME Silicon Valley Section
UG Students: J. Chin, E. Duro, T. Nguyen, S. Yeung, J. Ma
This flying robot is designed to detect a wildfire and predict its progress using sensors (CO, CO2, Temperature, and humidity). Then swarm of these robots will be develop along with a wireless communication technologies to establish a moving sensor network for firefighter protection.
Telepresence Rover for Active Videoconferencing, Inspection and Socializing (TRAVIS)
 UG Students: E. Stackpole, G. Barker, and S. Hu
UG Students: E. Stackpole, G. Barker, and S. Hu
This project developed a low-cost, remotely operated, stand alone, interactive telepresence rover that can roam indoor and outdoor for active videoconferencing, inspection, and socializing via the internet. The rover is maneuvered by two differential drive wheels driven by two motors (controlled by an Arduino microcontroller. An additional caster wheel prevents the rover from falling over. To provide users a realistic, immersive “life size” visual experience, the rover was designed to be 160 cm tall and has features that emulate a person – a head, neck, and torso mounted on a base. An HP Premium Autofocus Webcam, a Lilliput touch-screen LCD, and a Nano-ITX motherboard provide face-to-face communication between users. An Adobe Flash based interface allows users to operate the robot from any computer with a browser and internet connection. The total cost of TRAVIS was under $1000. This project won the best technical content award in 2009 ASME regional student competition.
The Robotic Matrial Arts Trainer
 Graduate Student: Thang Bui
Graduate Student: Thang Bui
This project focuses on creating a 9 DOF robotic trainer that fights back to create a realistic combat simulation. Pro Fu’s primary components are two arms that can execute combination of attacks and a torso that can twist 30° in each direction. Pneumatic cylinders are used to move the linkages and a compact design is needed to incorporate 3 DOF into the shoulders. The project consists of a design stage where concept of a skeleton, cylinder calculations, and analysis are formed.
Tool-gripper for Robot Surgery
 Graduate Student: James Nguyen
Graduate Student: James Nguyen
This project focuses on designing a gripper for medical robots. The gripper is actuated by pneumatic method. The force sensors are mounted on the gripper for haptic sensing. After completed the gripper assembly, the gripper is operated to grasp the surgery tool, and the output voltages are measure to obtain the relationship of force and voltage.
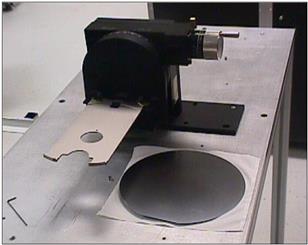
High Speed Wafer Carrier
 Sponsors: Applied Materials (Santa Clara, CA)
Sponsors: Applied Materials (Santa Clara, CA)
Graduate Student: Ray Chen
This project was to develop a 300 mm wafer carrier that can accompany the high robot speed without sacrificing current wafer placement accuracy and particle performance. The additional required for this project was that the carrier needs to sustain at least 3000C in steady state temperature for a period of time least than 10 second. The project began with multiple concepts such as deep pocket, elastomer, and robot wrist clamp for wafer carriers, through experimentation. One of the concepts was put into production release after passing in house testing and field qualifications.
Cytometer Autosampler
 Sponsors: Stratedigm Inc. (San Jose, CA)
Sponsors: Stratedigm Inc. (San Jose, CA)
UG Students: R. Y. Chen, M. K. Huynh, and H. Yip
Test Tube Autosampler is a loader assembly for Stratedigm’s first generation Flow Cytometer. This project designed a system that can store a minimum of 160 test tubes and maintain a test sample temperature of 8°C. The system can also convey test tubes from the storage area to Cytometer input needle, mix test samples, and scan test tube barcode labels.
Thermal Chamber Door Design for Synaptic Automated Touchpad Tester
 Sponsors: Synaptics Inc. (Santa Clara, CA)
Sponsors: Synaptics Inc. (Santa Clara, CA)
UG Students: J. Hayes and K. Leung
Synaptics develops various touchpads. This project is to design and fabricate a thermal chamber door for Synaptics’ new touchpad tester, and control the touchpad loader using a motor and computer programs. The tester can hold three samples in a chamber under different temperatures and humidity. Final prototype of the chamber door was tested under the extreme conditions and all touchpad testing requirements were achieved.
Publications
Books
Du, Winncy (2014), Resistive, Capacitive, Inductive, and Magnetic Sensor Technologies, Taylor & Francis Groups, ISBN-13: 978-1439812440; ISBN-10: 1439812446.
Du, Winncy and Yelich, Scott (2008), “Post-Earthquake Pipeline Leak Detection Technologies,” Part IX, Smart Sensors and Sensing Technology, Springer-Verlag, pp. 265-283. ISBN-13: 978-3540795896; ISBN-10: 3540795898.
Du, Winncy and Yelich, Scott, (2012) Chapter 2. Resistive and Capacitive Based Sensing Technologies, Modern Sensors, Transducers and Sensor Networks, International Frequency Sensor Association (IFSA) Publishing, ISBN-13: 978-8461596133; ISBN-10: 8461596137.
Patent Applications
Co-inventor of two unique Climbing Robot Designs for Pipe Inspection. These robotic designs were developed through NSF grant funds and patent applications must be processed through the University Foundation. One design was submitted to the Foundation in June, 2009 and is in the University’s approval and preparation process for U.S. patent application. The second design’s description is being finalized for submission to the University Foundation for patent submission consideration.
SELECTED Journal/Peer-Reviewed Conference Papers
Du, Winncy, Jose, Winston “Design of a Modular Signal Conditioning Circuit for Biopotential Sensors,” Sensor & Transducers Journal, Vol. 120, Issue 9, September 2010, pp. 1-11.
H. Myeong, Y. H. Yoon, N. J. Cha, Du, Winncy, and D. H. Kim, “User Tracking of an Educational Robot with Android Operating System Based Robot Platform,” in Proc.of 2012 IEEE 9th International Conference on Ubiquitous Robots and Ambient Intelligence, Nov. 26-29, 2012, Daejeon, Korea, pp.132-135.
Askeland, Jake and Du, Winncy, “Fast Exact Convex and Concave Curvature in Digital Images with an Application in Path-finding,” submitted to Journal of Computational Geometry: Theory and Applications, Paper Reference #: 707, 2014.
Du, Winncy, Nguyen, Hai; Scallion, Kevin; and Dutt, Amitesh, “Design of a GMR Sensor Array System for Robotic Pipe Inspection.” Proceedings of 2010 IEEE Sensor Conference, Nov. 1-4,
Du, Winncy and Yelich, Scott, “Resistive and Capacitive Based Sensing Technologies,” Sensors & Transducers Journal, Vol. 90, Special Issue, April 2008, pp. 100-116.
Du, Winncy, “Modeling and Control of a Universal Part Feeder (UPF),” Chinese Journal of Mechanical Engineering, Vol. 18, No. 3, 2005, pp. 317-320.
Du, Winncy, “A Mixed Learning Approach in Mechatronics Engineering,” World Transactions on Engineering and Technology Education, Vol. 2, No. 1, 2003, pp. 69-72.
Stackpole, Eric; Barker, Gregory; and Du, Winncy, “A Low-cost, Remotely Operated, Interactive Telepresence Rover for Active Videoconferencing, Inspection, and Socializing (TRAVIS),” submitted to International Conference in Robotics and Automation (ICRA 2015), paper attatched.
Du, Winncy and Kwok, Gary, “Experimental Comparison of Three Sensor Technologies in Pipe Leak Detection,” Proceedings of 2009 NSF Engineering Research and Innovation Conference, June 22-25, 2009, Honolulu, Hawaii, Paper Indexed by Grant #0619157.
Kwok, Gary and Du, Winncy, “Buildings’ Utility Pipes & Their Post-Earthquake Damage Detection,” Proceedings of NEES 6th Annual Meeting, June 18-20, 2008, Portland, Oregon, pp. 1-6.
Du, Winncy and Yelich, Scott, “Resistive Sensors: Principles, Design, and Applications,” Proceedings of the 2rd International Conference on Sensing Technology, Nov. 26-28, 2007, Palmerston North, New Zealand, pp. 326-331.
Du, Winncy and Yelich, Scott, “Capacitive Sensors: Principles, Design, and Applications,” Proceedings of the 2rd International Conference on Sensing Technology, Nov. 26-28, 2007, Palmerston North, New Zealand, pp. 332-337.
McMullin, K., Du, Winncy, Le, T, Stojadinovic, B., and Rai, K. (2007). “Experimental Testing of Drift-Sensitive Nonstructural Systems – Year 1.” Proceedings – 5th Annual Meeting. NEES Annual Meeting, Snowbird Village, Utah, June 18-21.
Du, Winncy and Yelich, Scott, “Biomechatronics: Emerging Technologies, Applications, and Challenges,” Proceedings of the 3rd International Conference on Autonomous Robots and Agents (ICARA), Dec. 12-14, 2006, Palmerston North, New Zealand, pp. 129-134.
Du, Winncy, and Gonzales, M., “Kalman Filter Design and Implementation for the 2D Real-time Testbed Control Using EVS,” Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, July 24-28, 2005, Monterey, CA, pp. 1453-1458.
Gonzales, M., and Du, Winncy, “Integration of an External Vision System into a 2D Spacecraft Testbed for Feedback Control,” Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, July 24-28, 2005, Monterey, CA, pp. 213-218.
Du, Winncy, Furman B., and Mourtos, N., “On the Ability to Design Engineering Experiments,” The 8th UICEE Annual Conference on Engineering Education,Feb. 7-11, 2005, Kingston, Jamaica, pp. 331-336.
Du, Winncy, “On Improvement of Graduate Mechatronics Course,” Proceedings of 2005 ASME International Mechanical Engineering Congress & Exposition, Orlando, Florida, Nov. 5-11, 2005, CD Proceeding: IMECE2005-82968).
Ramirez, H., and Du, Winncy, “Modeling & Control of a NiTi Shape Memory Alloy Actuator,” Proceedings of International Federation of Automatic Control, Sept. 6-8, 2004, Sydney, Australia, pp. 457-462.
Du, Winncy, “Development of a Modular Robot Assembly Kit for Robotics Education,” 11th World Congress in Mechanism and Machine Science (IFToMM 2003), August 18-21, 2003, Tianjin, China.
Jones, Kenny C., Du, Winncy, “Development of a Massage Robot for Medical Therapy,” Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, July 23-26, 2003, Kobe, Japan, pp. 1096-1101.
Du, Winncy, “Design of Proper Course Projects For Effective Student Learning,” Proceedings of International Federation of Automation Control, Berkeley, California, Dec. 9-11, 2002, pp. 685-690.
Du, Winncy, “Achieving Quality Teaching and Learning Through Integrating Proper Research Activities in Mechatronics Education,” Proceedings of 2002 ASME International Mechanical Engineering Congress & Exposition, New Orleans, Nov. 17-22, 2002 (CD Proceeding: IMECE2002-39471).
Du, Winncy, “Overview of Nondestructive Defect Detection Techniques,” Proceedings of the US-Korea Workshop on Smart Infra-Structural Systems, Pusan, South Korea, Aug. 23-24, 2002, pp. 291-299.
Kong, Edmund C., Du, Winncy, "Development of a Nursing Robot for the Elderly and Physically Disabled," Proceedings of the 8th Mechatronics Forum International Conference, June 24-26, 2002, Enschede, Netherlands, pp. 794-800.
Du, Winncy, "Motion Tracking of a Part on a Vibratory Feeder," Proceedings of 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, July 8-11, 2001, Como, Italy, pp. 75-80.
Du, Winncy, and Dickerson, Stephen L., “The 3D Part's Motion Control on a Horizontal-Vibrating Plate," Proceedings of the 7th Mechatronics Forum International Conference, September 6-8, 2000, Atlanta, Georgia. (CD Proceeding: Author Index – Du)
Du, Winncy, and Dickerson, Stephen L., “Modelling and Control of a Novel Vibratory Feeder,” Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Sept. 19-23, 1999, Atlanta, Georgia, pp. 496-501.
Du, Winncy, and Dickerson, Stephen L., “1-D Vibratory Feeder Control Using Modified PWM Signals," The 8th International Conference on Intelligent Systems, June 24-26, 1999, Denver, Colorado, pp. 82-87.
Du, Winncy, and Dickerson, Stephen L., "Passive Component Inspection Using Machine Vision,” Proceedings of International Conference and Exhibition on Multichip Modules and High Density Packaging, April 15-17, 1998, Denver, Colorado, pp. 74-79.
Dickerson, Stephen L., Du, Winncy, and Volcy, Jerry, “Integrated Vision Units for Process Monitoring and Feedback in Electronic Assembly,” The Sensors in Electronic Packaging-Symposium, ASME International Mechanical Engineering Congress and Exposition, Nov., 1995, San Francisco, CA, Vol. 14, pp. 73-78.
Videos and Links
1. Automatic Catheter Assembly for Boston Scientific Company
2. Dr. Du students take Robotics to a New Level at SJSU
3. Satellite Debris Collection Using Innovative Adhesive Methods